Offered student projects
Here we give a list of a few student project proposals. Individual proposals can (and should) be further discussed and tailored to the student’s interests and background. The projects are suitable for Bc (BEng), Ing (MEng/MSc) theses, but they are negotiable as assignments for summer jobs as well.
Unless otherwise specified, the projects are supervised by doc. Zdeněk Hurák and possibly co-supervised by junior members of the team (postdocs and even PhD students); the list may contain some proposals from closely collaborating senior faculty members as well.
Control and estimation for rail vehicles
Data-driven predictive energy-optimal control of rail vehicles
Problem statement
As the major energy consumption of a rail vehicle occurs during acceleration, optimizing the speed trajectories of vehicles is a promising way of reducing the overall energy consumption of public transportation. Such optimization (using methods of model-based optimal control design) has long been studied in the literature and even applied in practice. However, there are some challenges to the model-based approaches, primarily stemming from the fact that some of the relevant physical parameters of the model are difficult to obtain and they can also change in time. This motivates the development of approaches that are more systematically exploiting the historical data, which are becoming increasingly available thanks to the growing use of sensors and data collection in public transportation. The main goal of this project is to explore the potential of some of these data-driven methods for optimizing the speed trajectories of trams in urban environments.

Suggested approach
While the dominating approach (at least in the academic literature, and even more so in the robotics community) to data-driven control is based on Reinforcement Learning (RL), in this project two other approaches will be explored that seem to be somewhat more tailored to the problem. Namely, Koopman operator-based predictive control, and Willems’ fundamental lemma-based predictive control.
References
- Ošlejšek, Štěpán. ‘Green Light Optimized Speed Advisory for Trams’. Master’s Thesis, ČVUT v Praze, 2025. http://hdl.handle.net/10467/122607.
- Fanta, Vít. ‘Energy-Efficient Train Control’. Master’s Thesis, Czech Technical University, 2023. http://hdl.handle.net/10467/109765.
- Willems, Jan C., Paolo Rapisarda, Ivan Markovsky, and Bart L. M. De Moor. ‘A Note on Persistency of Excitation’. Systems & Control Letters 54, no. 4 (2005): 325–29. https://doi.org/10.1016/j.sysconle.2004.09.003.
- Dorfler, Florian. ‘Data-Enabled Predictive Control of Autonomous Energy Systems’. 2019. http://people.ee.ethz.ch/~floriand/docs/Slides/Dorfler_INI_2019.pdf.
- Do, Loi, Milan Korda, and Zdeněk Hurák. ‘Controlled Synchronization of Coupled Pendulums by Koopman Model Predictive Control’. Control Engineering Practice 139 (October 2023): 105629. https://doi.org/10.1016/j.conengprac.2023.105629.
Signal Control Warrants: Toward a Formal Characterization of When Intersections Need Traffic Signals
Problem statement
Guidelines on the conditions under which installation of new traffic light (TL) controllers is warranted vary. From the position of a car/bike driver or a pedestrian, it is not always clear whether traffic lights are truly improving the traffic situation at some intersections. The work would consist of constructing several simulation scenarios in the SUMO environment and further analysis of the simulation outputs. Inspection may reveal that the ordinary guidelines for TL implementation are not generally useful for wide range of intersection topologies. Alternative conditions could be proposed based on the simulation results.
Furthermore, as the traffic situation approximately follows a daily schedule, a TL control strategy could be devised to only activate the TL when the traffic conditions reach suitable state. Comparison of the effectiveness of the new and established approaches could be done in terms of traffic throughput metrics (passed vehicles per hour, total dead time, average travel time etc.).
References
- Bednář, Jan. ‘System Identification of a Traffic Light Controller from Operational Data’. Master’s thesis, Czech Technical University, 2026. https://hdl.handle.net/10467/178423.
- Ministerstvo dopravy a Ředitelství silnic a dálnic ČR. TP 81 Navrhování Světelných Signalizačních Zařízení pro Řízení Provozu Na Pozemních Komunikacích. Technické Podmínky TP 81. Politika jakosti pozemních komunikací, December 2015. https://pjpk.rsd.cz/data/USR_001_2_8_TP/TP_81.pdf.
- Bartoš, Luděk, Jan Martolos, Aleš Richtr, and Petr Kolečko. TP 188 Posuzování Kapacity Křižovatek a Úseků Pozemních Komunikací. August 2018. https://pjpk.rsd.cz/data/USR_001_2_8_TP/TP_188_2018.pdf.
- “Traffic Lights - SUMO Documentation.” Accessed May 11, 2026. https://sumo.dlr.de/docs/Simulation/Traffic_Lights.html.
Generic tram bogie position estimation
To be supervised by prof. Vladimír Havlena.
Problem statement
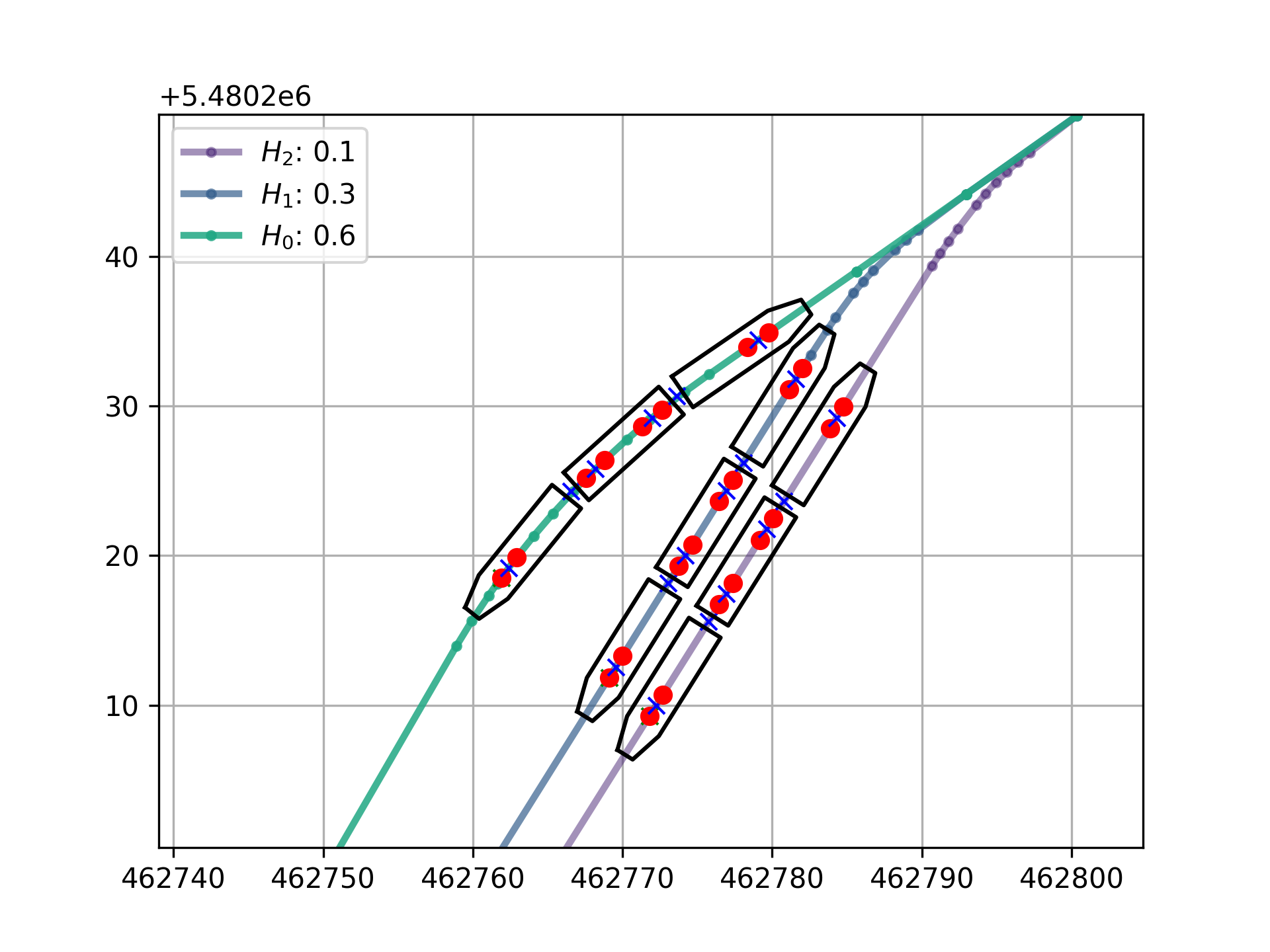
Modern driver assistance systems for rail vehicles rely on accurate estimates of the vehicle body position and velocity. Achieving the mentioned precision and reliability requires combining sensor measurements with knowledge of vehicle geometry. Rail vehicles are typically equipped with sensors such as GPS, IMU, and odometers, while the rail infrastructure layout is also known.
A key challenge is how to make effective use of sensor data when the sensors can be placed at different locations on the tram. In this case, the geometry of the vehicle, especially the bogie arrangement, must be considered. The bogie layout and sensor placement directly affect the measured quantities, such as the acceleration recorded by the IMU.
Suggested approach
The work will focus on formulating a suitable vehicle dynamics model and using Bayesian filtering methods, such as the Extended Kalman Filter or Iterated Extended Kalman Filter, to estimate the state variables describing the position of the vehicle body and its bogies.
References
- Schramm, Dieter, et al. Vehicle Dynamics: Modeling and Simulation. Springer, Second edition, Springer, 2018.
- D. Simon, Optimal State Estimation: Kalman, H, and Nonlinear Approaches. Hoboken, NJ, USA: Wiley-Interscience, 2006.
- W. Löffler and M. Bengtsson, Using Probabilistic Geometrical Map Information For Train Localization, 2022 25th International Conference on Information Fusion (FUSION), Linköping, Sweden, 2022.
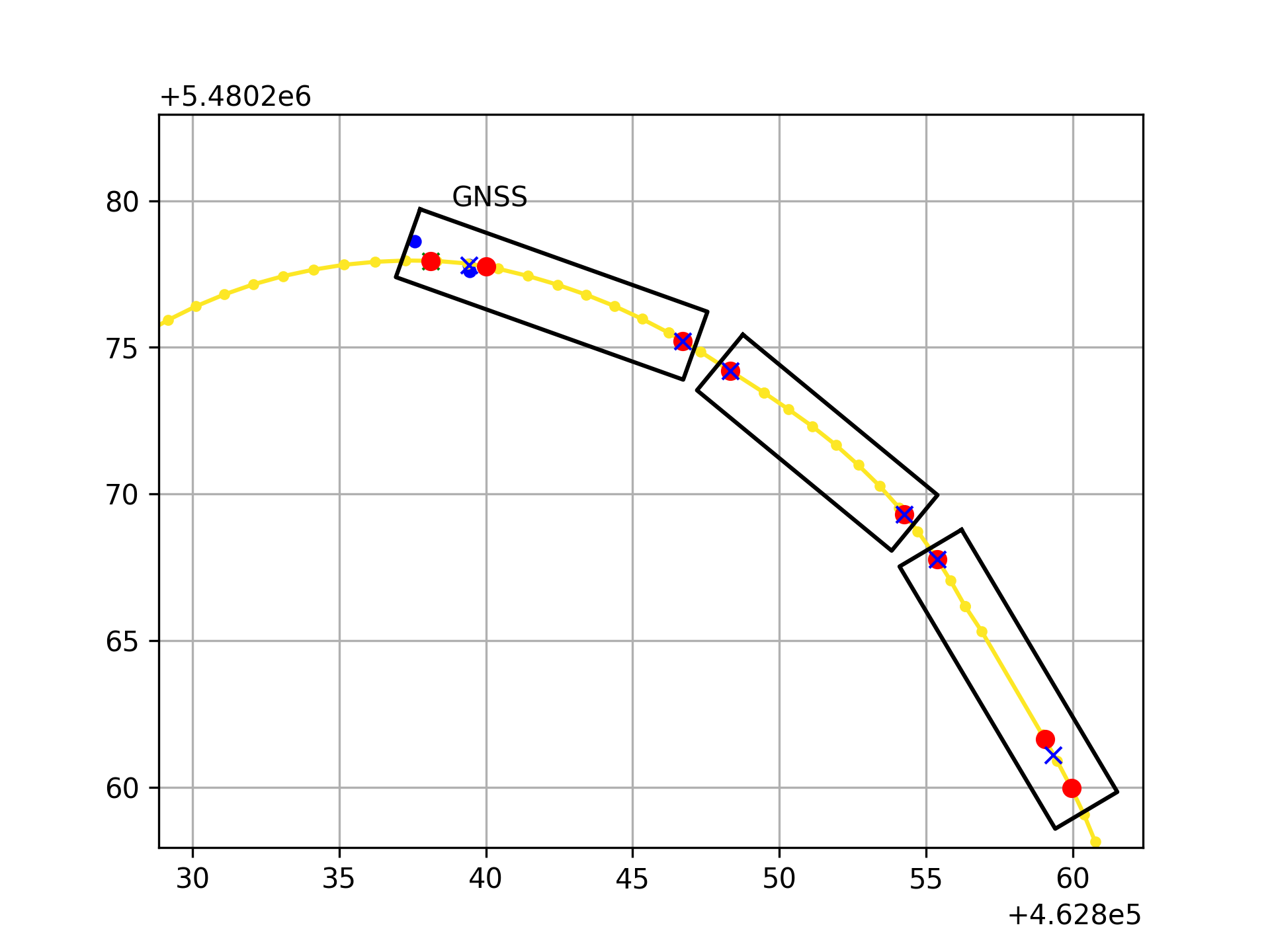
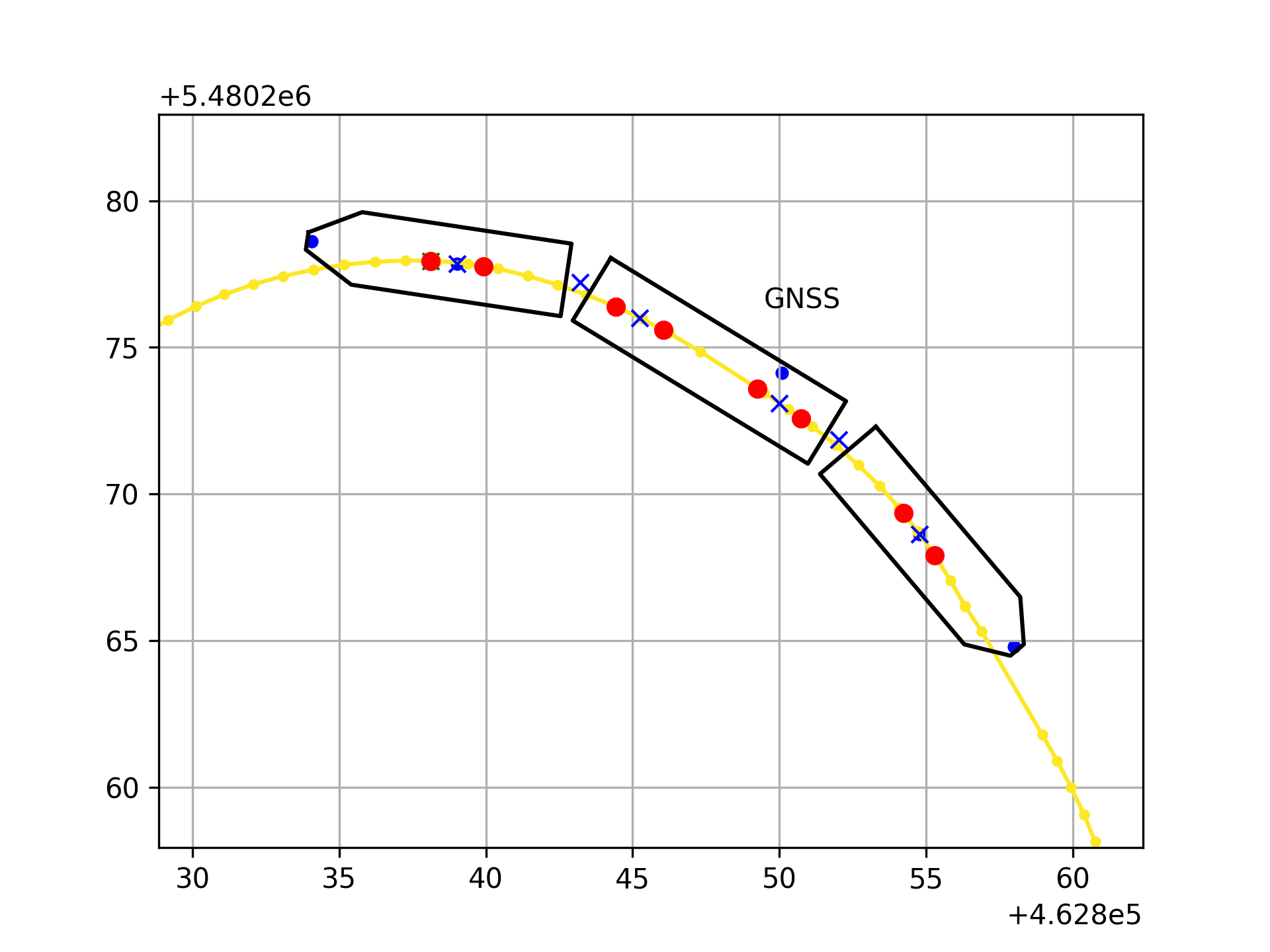
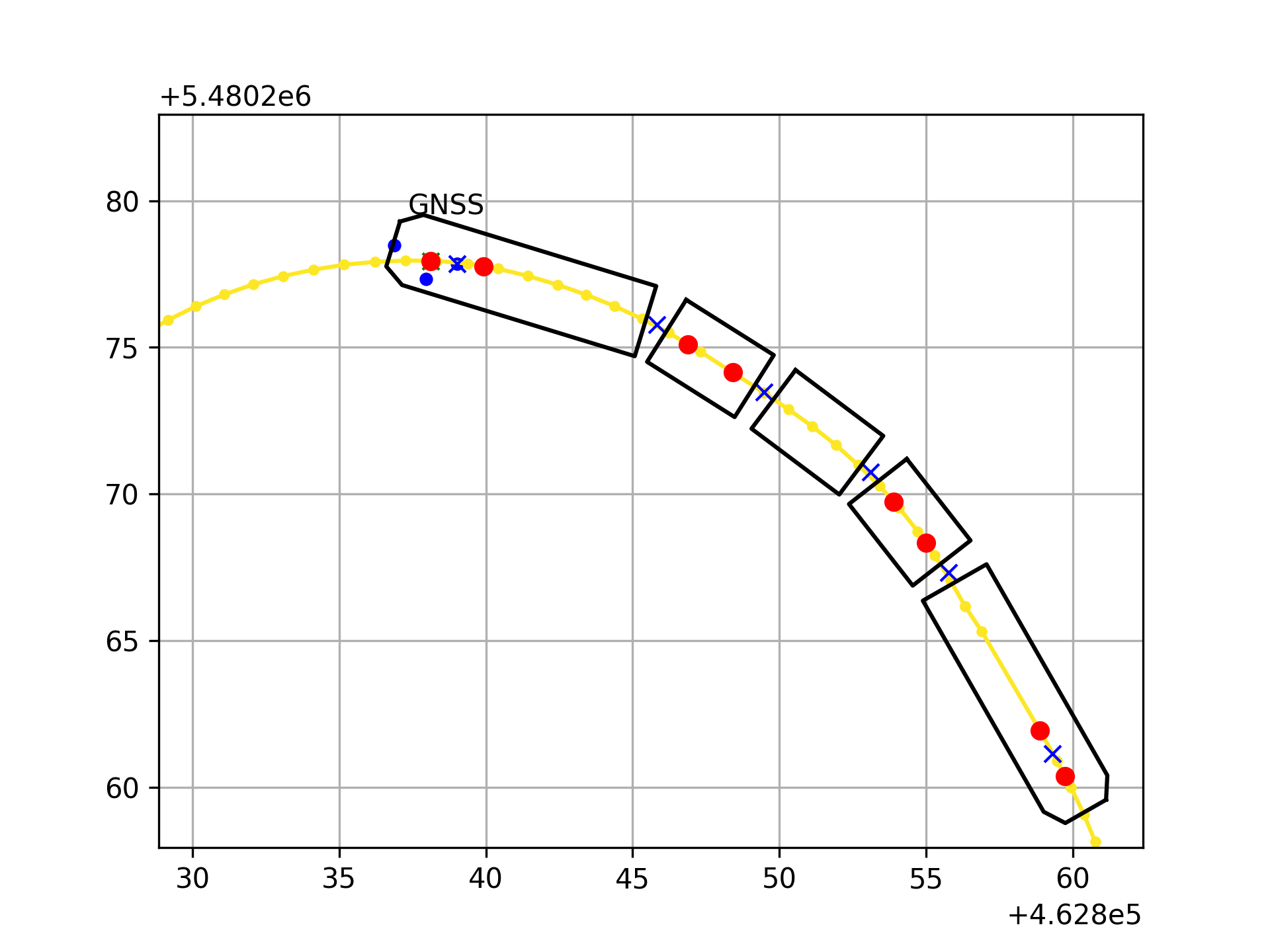
IMM-based tram localization at switches
To be supervised by prof. Vladimír Havlena.
Problem statement
Modern driver assistance systems for rail vehicles rely on accurate estimation of the vehicle’s position. A key challenge is to combine data from multiple sensors and to reliably determine which route the vehicle takes at track switches. This is important because the selected route directly affects the speed limit on the track currently being used. To solve this task, data from GPS, IMU, odometry, and a track infrastructure map can be fused together. The estimate may also be supported by information about the requested switch setting, but this input is uncertain because it is not always available and represents only the driver’s intention, not the actual switch position.
Suggested approach
The work will focus on formulating an interacting multiple model framework and applying a Bayesian filter, such as a Particle Filter, to test hypotheses about which route the vehicle took at switches.
References
- D. Simon, Optimal State Estimation: Kalman, H, and Nonlinear Approaches. Hoboken, NJ, USA: Wiley-Interscience, 2006.
- Särkkä S. Bayesian Filtering and Smoothing. Cambridge University Press; 2013.
- Heirich, Oliver, Bayesian Train Localization with Particle Filter, Loosely Coupled GNSS, IMU, and a Track Map, Journal of Sensors, 2016, 2672640, 15 pages, 2016.
- Mazor, E., Dayan, J., Bar-Shalom, Y., & Averbuch, A., Interacting Multiple Model Methods in Target Tracking: A Survey, 1988.
Tram energy consumption and dissipation estimation
To be supervised by prof. Vladimír Havlena.
Problem statement
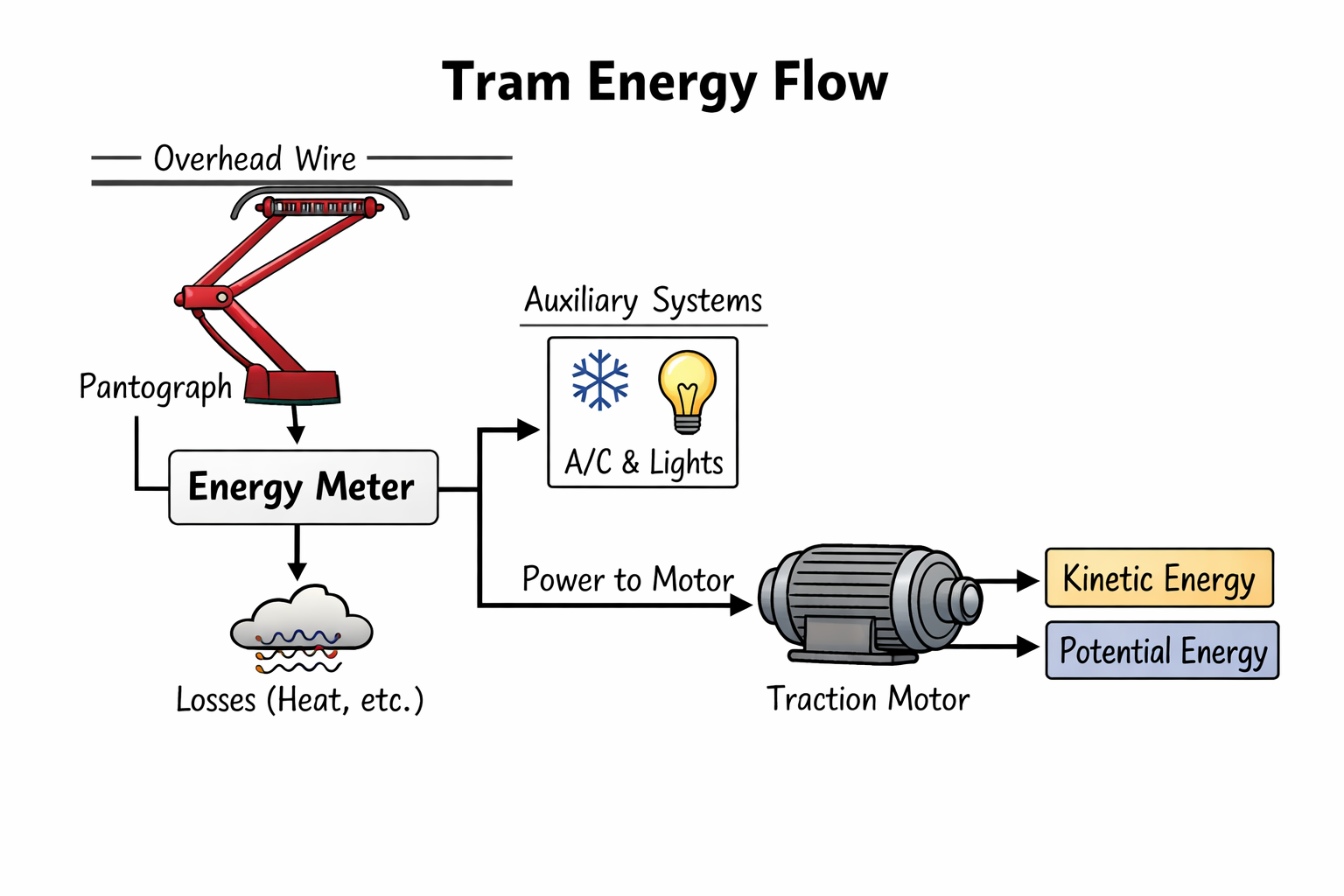
With the growing focus on sustainable transportation, reducing the energy consumption of rail vehicles has become an important challenge. A key difficulty is that the minimum energy needed over a full route cannot be measured directly in practice, mainly because the required measuring equipment is large and expensive. Instead, only the energy taken from the overhead wire can be measured, which also includes losses caused by electrical resistance and the power consumption of auxiliary systems. What we observe is the energy delivered by the motors and transformed into the train’s kinetic and potential energy. The aim of this thesis is therefore to estimate the motor energy demand using motor efficiency models, data from positioning sensors such as GPS, IMU, and odometry, together with infrastructure maps.
Suggested approach
The proposed solution is to estimate the vehicle’s kinetic and potential energy using Bayesian filtering methods, such as the Extended Kalman Filter or the Iterated Extended Kalman Filter.
References
- D. Simon, Optimal State Estimation: Kalman, H, and Nonlinear Approaches. Hoboken, NJ, USA: Wiley-Interscience, 2006.
- Z. Yan and Y. Min, Energy Consumption Prediction of Trams Based on Grey Relational Analysis and Regression Model, 2018 IEEE International Conference of Intelligent Robotic and Control Engineering (IRCE), Lanzhou, China, 2018.
Pareto front estimation for Automatic Train Operation (ATO)
To be supervised by prof. Vladimír Havlena.
Problem statement
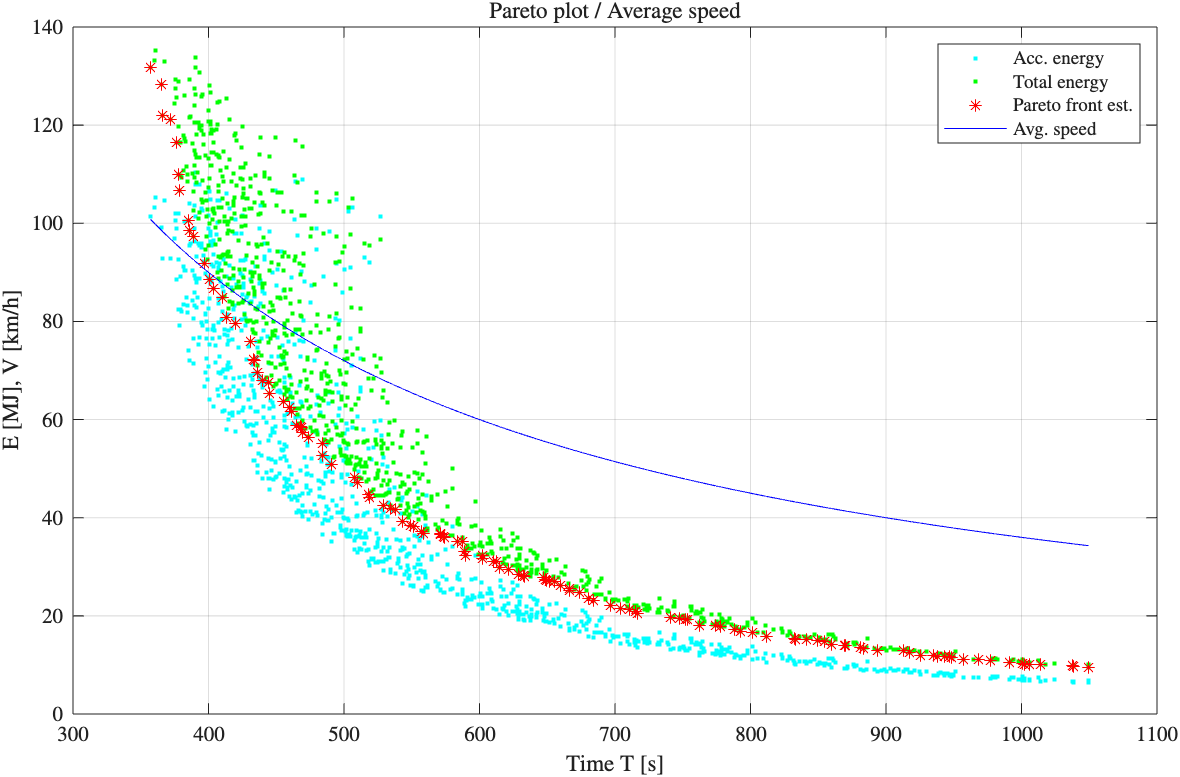
As sustainable transportation becomes increasingly important, reducing the energy consumption of rail vehicles is a highly relevant engineering challenge. In the case of trams operating in urban environments, this problem is much harder than for conventional trains, because city traffic conditions are uncertain and difficult to model using standard optimization methods. Stochastic approaches offer a promising way to handle this uncertainty, but they also introduce significant computational complexity. In practice, capturing all relevant uncertainties in a stochastic model would be difficult and would likely result in a model that is too complex for efficient real-world use.
The aim of this thesis is to determine the optimal trajectory between tram stops based on drivers’ routes, while accounting for route sections where lower speeds are required for safety. The main focus will be on estimating the Pareto front, which captures the trade-off between energy consumption and travel time for individual driver trips. This Pareto front will be estimated either from prior knowledge of its shape or by using Gaussian process regression or symbolic regression.
Suggested approach
The proposed approach uses Gaussian process regression or symbolic regression to model the Pareto front describing the efficiency of individual driver travel strategies.
References
- Chen W, Lu J, Zhang H, Yuan Z. Pareto Optimization of Energy-Saving Timetables Considering the Non-Parallel Operation of Multiple Trains on a Metro Line. Mathematics. 2023.
- Zhengqi Gao, Jun Tao, Yangfeng Su, Dian Zhou, Xuan Zeng, Projection based Active Gaussian Process Regression for Pareto Front Modeling, CoRR, 2020.
- J. Kubalík, E. Derner, R. Babuška, Symbolic Regression Driven by Training Data and Prior Knowledge, CoRR, 2020.
Application of Koopman MPC for automated vehicles crossing urban intersections
To be supervised by dr. Mehdi Naderi and co-supervised by doc. Zdeněk Hurák.
Problem statement
Intersections represent critical bottlenecks within urban traffic, responsible for a significant part of vehicle stops and consequently contributing to elevated fuel usage, emissions, as well as a notable proportion of collisions. Considering the advancement of Connected and Automated Vehicle (CAV) technology, there is a growing interest in signal-free intersection operations to enhance throughput, minimize vehicle stops, and improve safety and efficiency, with optimal and Model Predictive Control (MPC) recognized as the most effective approaches. A major challenge that optimization-based approaches usually face is computational complexity, when handling many vehicles at the same time, to address which they usually resort to some approximations or conversions that may degrade their performance.

Suggested approach
A reason for high computational demand for MPC approaches is the nonlinearity of the vehicle dynamics at intersections. One potential solution to this challenge involves utilizing Koopman MPC to derive a higher-dimensional linear model of the vehicle based on the collected data. Subsequently, MPC can be applied to this linear model, which may significantly reduce computational demands. The required data could be collected from microscopic simulations in a simulator like SUMO.
References
- Naderi, M., Typaldos, P., & Papageorgiou, M. (2025). Lane-free signal-free intersection crossing via model predictive control. Control Engineering Practice, 154, 106115.
- Korda, M., & Mezić, I. (2018). Linear predictors for nonlinear dynamical systems: Koopman operator meets model predictive control. Automatica, 93, 149-160.
Eco-driving control of trams considering interactions with adjacent trams
To be supervised by dr. Mehdi Naderi and co-supervised by doc. Zdeněk Hurák.
Problem statement
With the growing demand for sustainable urban transportation, improving the energy efficiency of tram systems has become an important research topic in intelligent transportation systems. Eco-driving strategies can significantly reduce energy consumption and operational costs while maintaining passenger comfort and schedule reliability. However, most existing approaches focus on individual tram operation and neglect the influence of nearby trams operating on the same network. Considering interactions with adjacent trams can enhance traffic coordination, reduce unnecessary braking and acceleration, and improve overall system efficiency. Therefore, developing an eco-driving strategy that accounts for adjacent tram behavior represents a promising step toward smarter and more sustainable urban rail transportation.

Suggested approach
The research will develop an optimal control framework for tram eco-driving that minimizes energy consumption while accounting for the behavior of adjacent trams. An optimization problem will be formulated in which optimal acceleration trajectory is determined so as to reduce overall energy usage while satisfying operational constraints including speed limits, timetable requirements, passenger comfort, and safety distances. In addition, information from adjacent trams, such as their positions and velocities, which might be received from infrastructure or be predicted by the ego tram, will be incorporated into the control strategy to improve coordination and avoid inefficient driving patterns caused by stop-and-go behavior.
References
- Enjalbert, S., & Boukal, Y. (2019). On the eco-driving trajectory for tramway system. IFAC-PapersOnLine, 52(19), 115-120.
- Typaldos, P., Chaanine, T., Pasquale, C., Siri, S., Papamichail, I., & Papageorgiou, M. (2026). Optimal control methodologies for urban eco-driving of electric vehicles with regenerative braking. IEEE Transactions on Intelligent Transportation Systems.
- Krňávek, D. Optimal Control for Recuperation of Regenerative Braking Energy in Electric Public Transport Vehicles. Master’s thesis, Czech Technical University in Prague, to be submitted in May 2026.
Control and optimization for clean(er) energy
Data-driven predictive control of combined heat and power (CHP) production
Problem statement
Utilization of the heat produced as a byproduct of the electricity generation (so-called Combined Heat and Power, CHP) in a district heating network has proven a functional contribution to improving the efficiency of the whole energy sector. This opportunity does not come without a technical challenge, though. Most systematic approaches to CHP are based numerical optimization of the production schedule, or equivalently, predictive control, which requires a model of the system. While computationally tractable models of the CHP plant and the district heating network exist, some parameters of these models can be difficult to obtain. Furthermore, some parameters can change in time. Last but not least, as real district heating networks contain many dozens of nodes, which imposes excessive computational demands on the optimization-based approaches, simplified reduced-complexity models are often searched for, but their parameters lack physical interpretability. All these challenges motivate the development of data-driven approaches to predictive control of CHP production, which use the historical data instead of physics-based equations and do not require explicit knowledge of the system parameters. The main goal of this project is to explore the potential of some of these methods.

Suggested approach
While the dominating approach (at least in the academic literature, and even more so in the robotics community) to data-driven control is based on Reinforcement Learning (RL), in this project two other approaches will be explored that seem to be somewhat more tailored to the problem. Namely, Koopman operator-based predictive control, and Willems’ fundamental lemma-based predictive control.
References
- Willems, Jan C., Paolo Rapisarda, Ivan Markovsky, and Bart L. M. De Moor. ‘A Note on Persistency of Excitation’. Systems & Control Letters 54, no. 4 (2005): 325–29. https://doi.org/10.1016/j.sysconle.2004.09.003.
- Dorfler, Florian. ‘Data-Enabled Predictive Control of Autonomous Energy Systems’. 2019. http://people.ee.ethz.ch/~floriand/docs/Slides/Dorfler_INI_2019.pdf.
- Do, Loi, Milan Korda, and Zdeněk Hurák. ‘Controlled Synchronization of Coupled Pendulums by Koopman Model Predictive Control’. Control Engineering Practice 139 (October 2023): 105629. https://doi.org/10.1016/j.conengprac.2023.105629.
- Svoboda, Pavel. ‘Modeling and Control of a District Heating Network for Combined Heat and Power Production’. Master’s thesis, Czech Technical University in Prague, To be submitted in May 2026.
Economical Operation of Battery Energy Storages Systems on Spot Electricity Markets
To be supervised by doc. Martin Klaučo.
Problem statement
This thesis develops a dispatch optimization model for a grid-connected Battery Energy Storage System participating in Czech spot electricity markets. The work combines mixed-integer linear programming (MILP) for the dispatch formulation, rainflow cycle counting for quantifying battery degradation as an explicit cost term, and a rolling-horizon backtest on historical OTE price data using realistic point-in-time price forecasts (ARIMA or gradient-boosted regression as baseline). The optimizer schedules charge/discharge subject to state-of-charge, power, round-trip efficiency, and degradation constraints, and is evaluated against simple benchmark strategies (fixed-threshold arbitrage, perfect-foresight upper bound) with sensitivity analysis on forecast error, battery sizing, and degradation parameters. The deliverable is a working dispatch prototype in Python (Pyomo or similar) and a quantitative estimate of achievable annual revenue per installed MWh under realistic Czech market conditions.

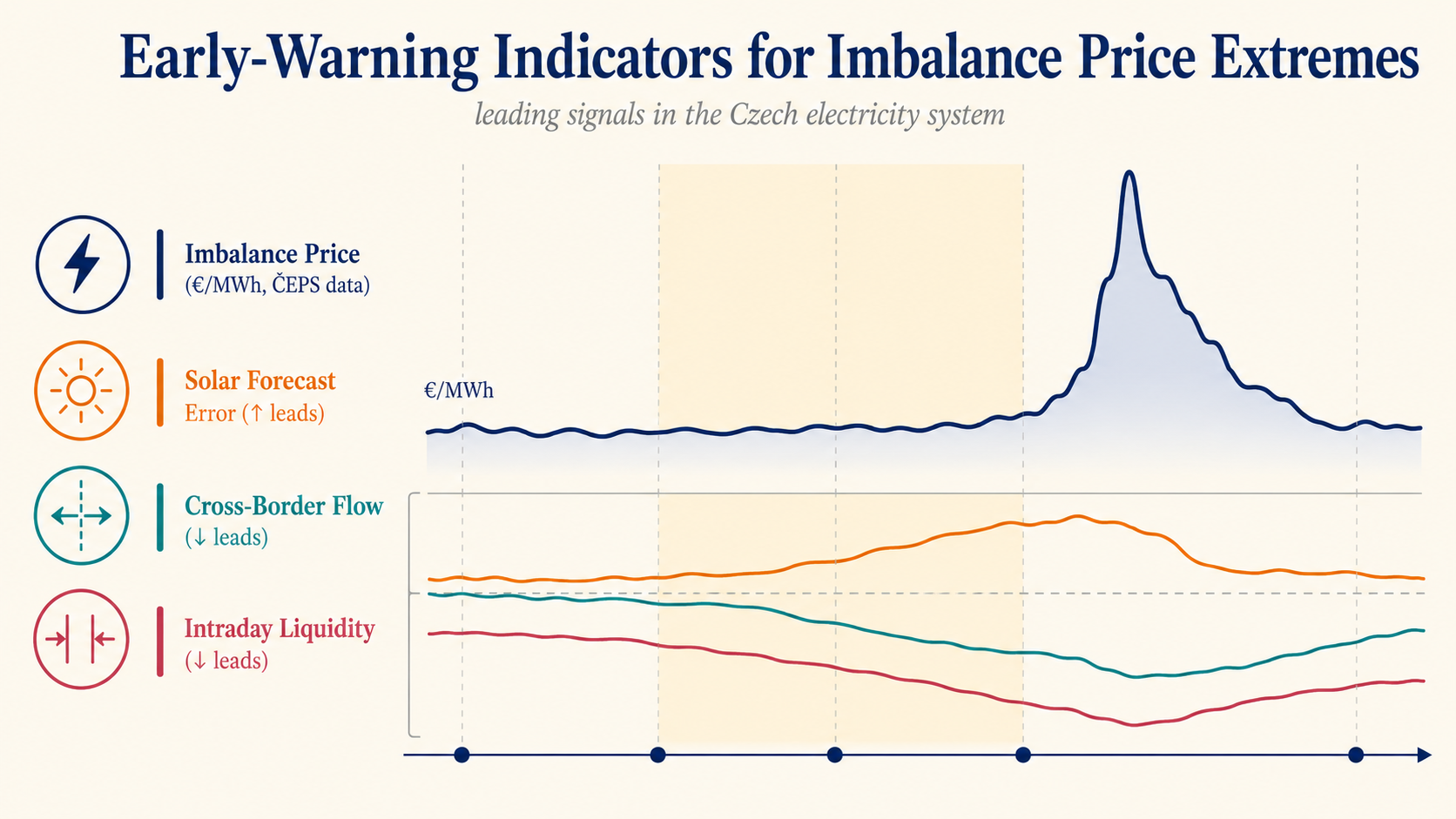
Early-Warning Indicators for Extreme Imbalance and Balancing-Price Events in the Czech Electricity System
To be supervised by doc. Martin Klaučo.
Problem statement
This thesis develops data-driven early-warning indicators for extreme system imbalance and balancing-price events in the Czech electricity system, using exclusively public data from ČEPS and the ENTSO-E Transparency Platform. Tail events are labeled using Extreme Value Theory (peaks-over-threshold) applied to ČEPS 15-minute imbalance and balancing-price series. Candidate leading features — renewable forecast errors, load forecast errors, planned and unplanned outages, cross-border flows, and neighboring TSO imbalances — are engineered under strict point-in-time discipline to avoid look-ahead bias. The forecasting model combines logistic regression as an interpretable baseline with gradient-boosted trees (XGBoost or LightGBM) as the main classifier, evaluated on a rolling-origin out-of-sample scheme over multiple years. Performance is measured using precision-recall curves, lead-time distribution, and cost-weighted evaluation (false-alarm vs. missed-event cost in EUR), benchmarked against a persistence baseline and a naive forecast-error threshold rule. The deliverable is a working Python prototype producing real-time early-warning probabilities, a quantitative characterization of achievable lead time and detection rate at acceptable false-alarm cost, and an explicit discussion of which event classes remain out-of-distribution and therefore unforecastable from public data alone.